Las características de la respuesta transitoria constituye uno de los factores más importante en el diseño de sistemas.
En muchos casos prácticos, las características deseadas de un sistema de control pueden darse en términos de las especifícaciones de la respuesta transitoria. Con frecuencia tales características de comportamiento se especifícan en términos de la respuesta transitoria a la entrada escalón unitario, puesto que éste es fácil de generar y es suficientemente eficaz.
Es importante estudiar la respuesta temporal del sistema dado que:
- Durante este régimen pueden aparecer, si es un sistema de tipo oscilatorio, valores muy elevados de las variables involucradas.
- Un régimen transitorio poco amortiguado no es aconsejable debido a que el desplazamiento del nivel esperdo toma valores instántaneos muy elevados.
- Si el transitorio es muy lento indica que el sistema toma demasiado tiempo en adaptarse a una entrada.
La respuesta transitoria de un sistema de control práctico a menudo muestra oscilaciones amortiguadas antes de alcanzar el estado estable, existen párametros de diseño basados en las especificaciones de dicha respuesta.
Un sistema muy estudiado cuya respuesta transitoria es característica de los sistema de control es un sistema de segundo orden:

La salida de un sistema de segundo orden ante un escalón unitario en el dominio laplaciano esta dada por: 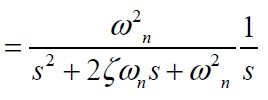
Al hallar la transformada inversa se obtiene la respuesta temporal: y(t)

Cuya curva de respuesta es la siguiente:

ESPECIFICACIONES:
tr = tiempo de subida:

 tp = tiempo pico: es el tiempo requerido para que la respuesta alcance el primer pico de sobrepaso del valor final.
tp = tiempo pico: es el tiempo requerido para que la respuesta alcance el primer pico de sobrepaso del valor final. Mp = Sobrepaso o sobredisparo: es el valor del primer pico que tiene la respuesta.
Mp = Sobrepaso o sobredisparo: es el valor del primer pico que tiene la respuesta. Ts = tiempo de establecimiento. Es el tiempo requerido para que la respuesta del sistema mantenga oscilaciones dentro del rango del 2% del valor final.
Ts = tiempo de establecimiento. Es el tiempo requerido para que la respuesta del sistema mantenga oscilaciones dentro del rango del 2% del valor final.


 La respuesta ante una entrada escalón unitario es la siguiente:
La respuesta ante una entrada escalón unitario es la siguiente:












